
Los motores asíncronos o de inducción, por ser robustos y más baratos, son los motores más ampliamente utilizados en la industria. En estos motores, el campo giratorio tiene la velocidad sincronía de acuerdo a la frecuencia de la línea alimentadora.
Teóricamente, para el motor girando en vacío y sin perdidas, el rotor tendría también la velocidad incrona. Pero al ser aplicado el par externo al motor, su rotor disminuirá la velocidad en la justa proporción necesaria para que la corriente inducida por la diferencia de rotación entre el campo giratorio (síncrono) y el rotor, pase a producir un par electromagnético igual y opuesto al par externamente aplicado.
La rotación del eje del motor es expresado por:

Básicamente los motores asíncronos se subdividen en dos tipos principales, los cuales son:
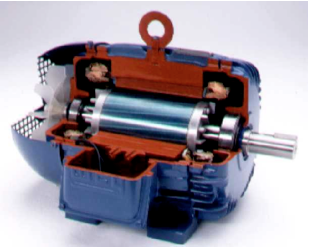
Rotor con JAULA
Los motores de este tipo también son comunmente llamados de motores de JAULA DE ARDILLA,
pues su enrollamiento rotórico en forma de barras tiene la característica de ser corto-circuitado,
deslizamiento (s)
En un motor eléctrico asíncrono, el rotor siempre va a girar con rotación abajo de la rotación del campo giratorio y, por lo tanto, habrá corriente y par (par electromecánico) inducidos. La diferencia relativa entre las velocidades del rotor y del flujo del estator (síncrona) es conocida como “deslizamiento” y es representado por:
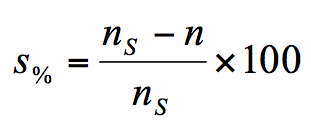
Donde: nS = Velocidad síncrona (rpm);
n = Velocidad rotórica (rpm);
s = Deslizamiento.
Si el motor gira a una velocidad distinta de la velocidad síncrona (rotación del campo giratorio), las barras del rotor cortan las líneas de fuerza magnéticas del campo giratorio y, por las leyes del electromagnetismo, circularán en él corrientes inducidas. Cuanto más grande la carga, más grande tendrá que ser el par necesario para accionarla. Para obtener un mayor par, proporcionalmente tendrá que ser mayor la diferencia de velocidades entre rotor y el campo giratorio en el estator para que las corrientes inducidas y los campos producidos sean mayores. Por lo tanto, en la medida que la carga aumenta, baja la la velocidad de rotación del motor. Cuando la carga es cero (motor en vacío) el rotor va a girar prácticamente en la rotación síncrona.
La frecuencia de la corriente inducida en el rotor es igual al deslizamiento multiplicado por la frecuencia del estator. O sea:
En vacío el deslizamiento es muy pequeño, por lo tanto, como en el rotor, su reactancia y su f.e.m. inducida son todas muy pequeñas. Así, la corriente del rotor es reducida, solamente lo suficiente para producir el par necesario en vacío. El factor de potencia es extremamente bajo y en atraso, con cos j < 0,3, pues la corriente que circula por el motor es utilizada solamente para su magnetización.
Cuando una carga mecánica es aplicada al rotor, la velocidad reduce un poco. El pequeño decrecimiento en la velocidad causa un aumento en el deslizamiento, en la frecuencia de la corriente rotórica, en su reactancia y en su fuerza electromotriz inducida. El aumento de la corriente inducida en el rotor se refleja en un aumento de la corriente primaria del estator (componente que produce potencia). Una corriente más grande será producida en el estator, con un mejor factor de potencia, tendiendo a producir más potencia mecánica y solicitar más potencia de la línea. En plena carga El motor de inducción va a girar con un deslizamiento que produce el equilibrio entre el par desarrollado por el motor y el par resistente de la carga.
El factor de potencia en plena carga varía desde 0,8 (en pequeños motores de aproximadamente 1 hp) hasta aproximadamente 0,95 (en los grandes motores, arriba de 150 hp). En primer análisis puede aparentar que aumentos adicionales a la plena carga producirán mejoría en el factor de potencia, y aumento en la corriente de fase del estator. Pero, con el aumento de la carga y del deslizamiento, la frecuencia de la corriente rotórica sigue a aumentar y el aumento en la reactancia del rotor produce una disminución en el factor de potencia del mismo. Por lo tanto, con cargas arriba de la plena carga, el factor de potencia se aproxima de un máximo y entonces baja rápidamente.
Rotor devanado
El motor de anillos rozantes posee la misma característica constructiva del motor de inducción con relación al estator, pero su rotor es embobinado con un enrollamiento trifásico en vez de unas cuantas barras, accesible eléctricamente a través de tres anillos con escobillas colectoras en el eje.
Gracias a característica del ajuste de la curva de par x rotación en función del aumento de la resistencia rotórica por la inclusión de resistores externos en serie con los devanados del rotor, son estos motores ampliamente utilizados en el accionamiento de sistemas de elevada inercia y en los casos en que el par resistente en bajas rotaciones sea alto comparativamente al par nominal.
Por otro lado, para accionamientos con baja inercia, estos motores pueden presentar corrientes de aceleración reducidas.

Motor asincrónico de rotor de anillos.
